RoboVibe - Strategy and Mission Planning
RoboVibe is an interactive, visual path-planning and strategy platform for mobile robots. It combines precise field mapping, physics-based simulation, and comprehensive mission management to help teams, educators, and hobbyists design reliable robot runs.
Interactive Mission Planning
Designing reliable robot missions requires more than just drawing a line. It demands accurate geometry, an understanding of physics, and strategic scoring. RoboVibe addresses critical challenges in competitive robotics:
- Precision: Design on a 1:1 scale field map where every millimeter counts.
- Physics Intuition: Visualize wheel slip, friction, and dynamic errors before you run the robot.
- Strategy & Scoring: Manage mission objectives, track scores, and optimize your run for maximum points.
- Reproducibility: Export clean, kinematic-aware code (Python/Pybricks) ready for your robot.
Core Pillars
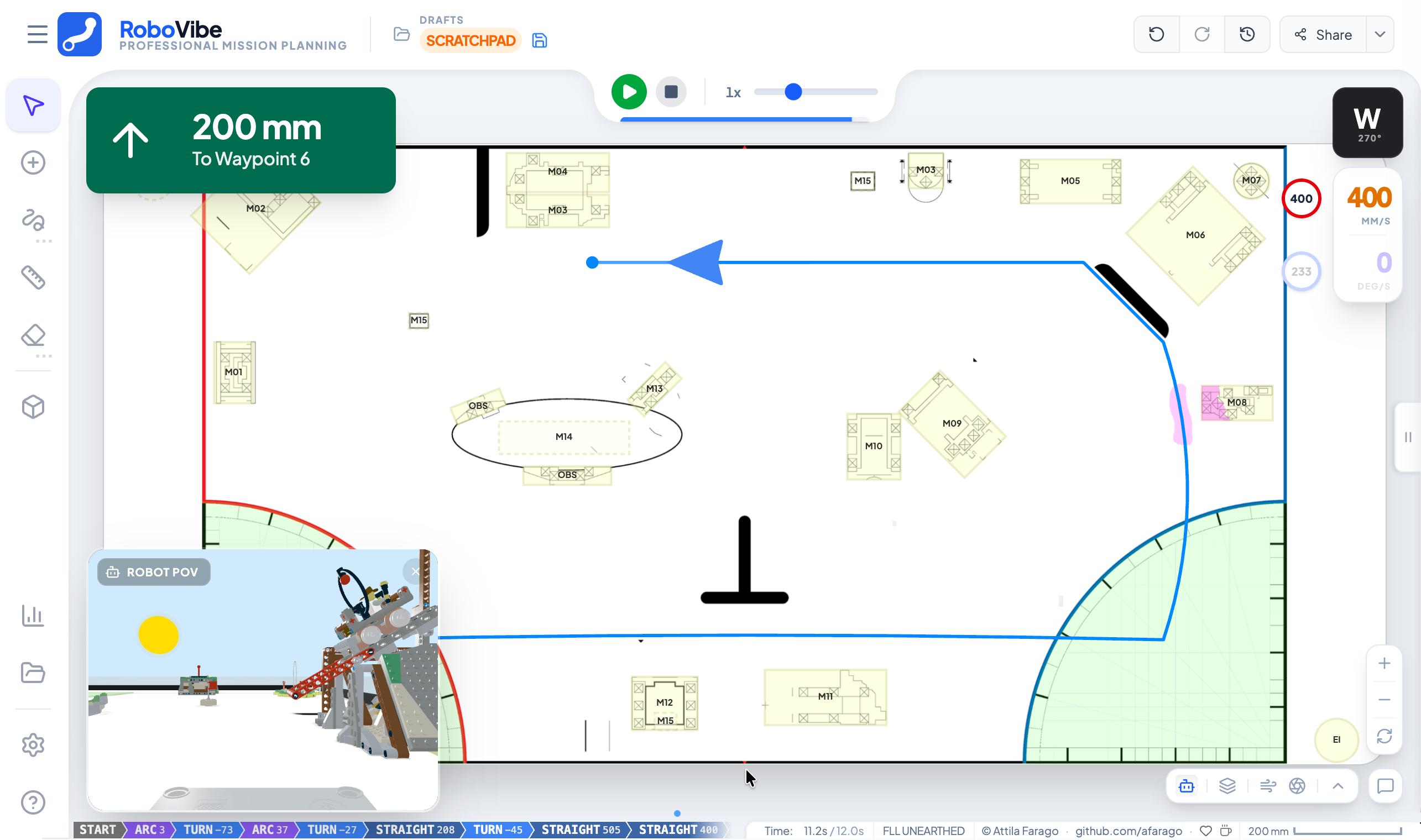
🗺️ Interactive Map Canvas
Precise, vector-based path editing with smart snapping and arc tools. Switch between 2D planning and 3D visualization. Easily convert straight lines to smooth curves with adjustable handles.
⚛️ Physics & Simulation
Simulation of wheel slip, centrifugal forces, and robot dynamics. Real-time feedback on acceleration limits and friction coefficients helps catch geometry and physics errors in simulation, saving battery and table time.
🏆 Mission & Strategy
Integrated scoring, mission badges, and strategy visualization. Define and track mission objectives with automatic score calculation. Presentation mode simplifies team reviews.
☁️ Cloud & Collaboration
Real-time synchronization of projects and programs using Firebase. Design on a tablet, refine on a laptop. Your whole team stays on the same page.
⌨️ Productivity & Export
Instant export to structured command sequences compatible with Pybricks, SPIKE, and more. Use keyboard shortcuts (Arrow keys, WASD) and playback panels to verify logic step-by-step.
Detailed Features
Mission Planning & Editing
- Projects & Programs: Organize, save, and load custom missions.
- Add Waypoint: Drop target coordinate pins across the field map.
- Draw Path: Freehand sketching tool processed into traversable waypoints.
- Measure Tool: Calculate distance and angle between distinct points.
Strategy & Analytics
- AI Path Planner: Leverage AI to calculate the most efficient travel path.
- Scoring View: Monitor exact score and objectives in real-time.
- Score Density: Heat-map visualization pinpointing lucrative target areas.
- Analytics & Reports: Metrics about path complexity, expected runtime, and efficiency.
Visualization & Simulation
- 3D Simulate: Evaluate 2D plans in a fully interactive 3D environment.
- AR Verifier: Project mapped digital waypoints onto the real-world playing field using Augmented Reality.
- Presentation Mode: Distraction-free layout tailored for clear visual communication.
Technical Stack
- Frontend: React 18, TypeScript, Vite
- Styling: Tailwind CSS
- Backend: Firebase (Cloud Sync)
- Rendering: SVG for path rendering, 3D experimental engine for glTF models
- Integration: Pybricks Python bindings
Usage & Controls
Basic Path Creation
- Add waypoints: Click on the map to add points
- Move waypoints: Drag the white circular handles
- Create curves: Drag the white handle at the segment midpoint
- Adjust heading: Select the last waypoint and use Left/Right arrows
- Delete waypoints: Select and press Delete/Backspace
Keyboard Shortcuts
| Key | Action |
|---|---|
Click | Add waypoint |
Drag | Move waypoint |
Double-click waypoint | Remove waypoint |
Left/Right Arrow | Rotate last waypoint ±15° |
Up/Down Arrow | Extend path from last waypoint |
Delete/Backspace | Remove selected waypoint |
Ctrl/Cmd + Z | Undo |
Shift + Drag | Bypass angle snapping |
Get Started
The community version of RoboVibe is available on GitHub. You can explore the code, contribute, or set up your own instance.